






 بدون حذف صفر و قطب در متلب")
 در متلب")


 در متلب")
 در حضور نویز سفید با متلب")



 از تمامی کشورها در متلب")


تخمین آنلاین پارامترهای موتور PMSM بر مبنای تزریق جریان با MATLAB
در این بخش پروژه شبیه سازی تخمین آنلاین پارامترهای موتور PMSM بر مبنای تزریق جریان در نرم افزار MATLAB به همراه گزارش کار آماده کرده ایم که براساس مقاله A Novel Current Injection-Based Online Parameter Estimation Method for PMSMs Considering Magnetic Saturation انجام شده است. در ادامه توضیحاتی از معرفی پروژه ارائه شده و فیلم و تصاویر خروجی پروژه در محیط متلب قرار داده شده و مقاله نیز قابل دانلود است.
معرفی پروژه
در این پروژه فرایند شبیه سازی مقاله فوق مورد بررسی قرار گرفته است. در این مقاله فرایند تخمین برخط (Online) یک موتور سنکرون مغناطیس دایم (PMSM) ارائه شده است. در روش پیشنهادی مقاله، ایده تزریق جریان برای محاسبه پارامترهای موتور مورد استفاده قرا گرفته است. پارامترهای تخمینی شامل مقاومت سیم پیچی، اندوکتانس محورهای dq و فلوی روتور می باشد. در این مقاله از مدل ساده شده برای مدلسازی اثرات اشباع (تکی و متقابل) استفاده شده است.
تخمین پارامترها به صورت آنلاین
حلقه کنترل جریان الکتریکی بسیار سریع تر از پاسخ سیستم مکانیکی در درایو ماشین های الکتریکی می باشد. لذا گشتاور بار در طول تزریق جریان ثابت فرض شده است. این فرض زمانی که از درایوهای کنترلی استفاده میشود، در بازههای زمانی کوتاه منطقی می باشد. در این تحقیق از الگوریتم حداقل مربعات خطا (RLS) برای تخمین پارامترها استفاده شده است. توضیح مختصری در مورد این روش در ادامه ارایه خواهد شد. در شکل زیر بخش a بیانگر بلوک دیاگرام شماتیکی روش تزریق جریان و بخش b چگونگی پیاده سازی این روش را نشان می دهد. تزریق جریان زمانی اعمال می شود که سیستم به پاسخ حالت ماندگار رسیده است. در مرحله نخست اطلاعات حالت ماندگار (به ازای جریان نامی (id1) ثبت می شود. سپس جریان id2 تزریق شده و متغیرهای سیستم پس از رسیدن سیستم به حالت ماندگار ثبت می گردد. این روند تا تزریق جریان و ثبت اطلاعات آخرین گام ادامه می یابد.

شکل 1 – بلوک دیاگرام کنترل جریان و نحوه تزریق
تخمین پارامتر به روش حداقل مربعات (RLS)
در مدلسازی به روش حداقل مربعات (RLS) هدف این است مدلی بدست آوریم که وقتی ورودی را به آن می دهیم، تخمین خروجی را به ما بدهد. در این مرحله ابتدا یک ورودی معلوم به سیستم اعمال نموده و خروجی را ضبط می نماییم. یعنی با یک دستگاه نمونه بردار، از لحظه اعمال ورودی به سیستم، خروجی سیستم همگام با ورودی، نمونه برداری شده و در کامپیوتر ذخیره می شود. در طول این آزمایش زمان نمونه برداری T ثابت است. در این حالت پس از انجام آزمایش دو بردار معلوم از ورودی و خروجی خواهیم داشت. در این روش فرض بر این است که هرگونه اندازه گیری از اطلاعات همراه با خطا و نویز است. حتی اگر اندازه گیری نیز بدون خطا باشد ممکن است در ساختار سیستم خطا وجود داشته باشد، مثلأ برای سیستم غیرخطی یک مدل خطی در نظر گرفته شده باشد. در این روش سعی بر این است تا مربع خطای ناشی از اندازه گیری و ساختار حداقل گردد.
شبیه سازی با سیمولینک MATLAB
در این مرحله شبیه سازی حلقه کنترل جریان در محیط سیمولینک نرم افزار MATLAB به انجام رسید. اختلافاتی که در این تحقیق با مقاله اصلی وجود دارد به شرح زیر است:
بر مبنای توضیحات فوق شبیه سازی اجرا گردید. در طراحی بخش کنترل ضرایب بسیار متنوعی تست گردید و نهایتاً بهترین ضرایب کنترلر تناسبی – انتگرالی برای حلقه کنترل جریان در نظر گرفته شد. شکل زیر حالت شماتیکی شبیه سازی مورد نظر را نشان می دهد. زمان شبیه سازی از صفر تا 1.2 sec در نظر گرفته شد. بر مبنای شکل زیر بخش های اصلی شبیه سازی شامل تعیین ورودی ها، بخش کنترل، موتور سنکرون و بخش کانورتر می باشد. پارامترهای موتور بر اساس داده های مقاله مرجع تنظیم شده است.
شکل 2 – شماتیکی شبیه سازی تخمین پارامتر موتور سنکرون با روش تزریق جریان
ورودی مدل شبیه سازی در شکل زیر نمایش داده شده است. بر اساس این شکل سه ورودی اصلی سیستم مورد نظر شامل منحنی گشتاور، منحنی سرعت و منحنی جریان تزریق شونده می باشد. بر مبنای ورودی های فعلی، گشتاور 50 نیوتن متر و دور موتور 50 دور بر دقیقه در نظر گرفته شده است. در ابتدا جریان تزریقی محور d برابر صفر در نظر گرفته شده و سپس در سه مرحله این جریان به مقادیر 1- ، 2- و 3- تغییر می یابد.

شکل 3 – ورودی های شبیه سازی
اجزای داخلی بخش کنترل در شکل زیر نشان داده شده است. همانطور که مشاهده می شود زیر مجموعه های اصلی بخش کنترل شامل حلقه کنتر خارجی، حلقه کنترل جریان، اندازه گیری و جدول بندی وظایف می باشد. مهمترین پارامترها در قسمت کنترلی ضرایب کنترلرهای PI حلقه کنترل جریان محورهای d و q می باشد.

شکل 4 – زیر مجموعه های بخش کنترل

شکل 5 – بخش Measurements از فایل سیمولینک جهت ثبت متغیرهای مورد نیاز برای تخمین
بررسی نتایج شبیه سازی
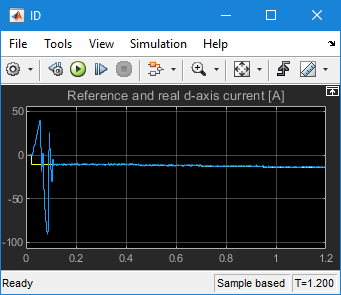
به منظور بررسی نتایج حاصله، برنامه را به ازای ورودی های ارائه شده در شکل 3 و پارامترهای ارایه شده در مقاله اجرا می کنیم. البته همانطور که پیشتر توضیح داده شد، بسیاری از پارامترهای مورد نیاز از جمله جزییات بخش کنترل در مقاله ارایه نشده است که مقادیر مربوطه پس از بررسی عملکرد سیستم اختصاص داده شد. پس از اجرای فایل initial.m، برنامه شبیه سازی اجرا می گردد. جهت ارزیابی عملکرد حلقه کنترل جریان برنامه idqplot.m اجرا شد که نتایج حاصل در شکل های 6 و 7 نشان داده شده است. همانطور که مشاهده می شود، به جز شرایط گذرای اولیه، مقادیر هر دو جریان از مقادیر مرجع متناظر تبعیت نموده است. به منظور بررسی دقیقتر موضوع، منحنی جریان id با بزرگنمایی بیشتر در شکل 8 نمایش داده شده است.

شکل 6 – جریان id و مقدار مرجع مربوطه

شکل 7 – جریان id و مقدار مرجع مربوطه

شکل 8 – جریان id و مقدار مرجع مربوطه همراه با بزرگ نمایی
تصاویری از خروجی







 در سیمولینک متلب")
 در سیمولینک متلب")
 در متلب")
 در متلب")


")




هیچ نظری ثبت نشده است